
【導(dǎo)讀】全自動(dòng)駕駛的未來(lái)已不再遙不可及。如今,與自動(dòng)駕駛相關(guān)的問(wèn)題主要圍繞讓自動(dòng)駕駛成為現(xiàn)實(shí)所需的底層技術(shù)和技術(shù)進(jìn)步來(lái)展開(kāi)。在支持向自動(dòng)駕駛應(yīng)用過(guò)渡方面,激光探測(cè)和測(cè)距(LIDAR)技術(shù)是討論最多的技術(shù)之一,但仍存在諸多問(wèn)題。測(cè)距范圍大于100米,角分辨率達(dá)到0.1°的LIDAR系統(tǒng)仍然是自動(dòng)駕駛領(lǐng)域里的核心模塊。但是,并非所有自動(dòng)駕駛應(yīng)用都需要這種級(jí)別的性能。泊車(chē)助手和街道清掃就是其中兩個(gè)。
目前有大量景深測(cè)量技術(shù)可以實(shí)現(xiàn)這些應(yīng)用,例如無(wú)線電探測(cè)和測(cè)距(雷達(dá))、立體視覺(jué)、超聲波探測(cè)和測(cè)距,以及LIDAR。但是,這些傳感器都是在性能尺寸成本之間做了妥協(xié)。超聲波器件最為經(jīng)濟(jì)高效,但其范圍、分辨率和可靠性都很有限。雷達(dá)的檢測(cè)范圍和可靠性得到大幅提升,但它的角分辨率存在限制;此外,立體視覺(jué)的計(jì)算成本非常高,而且如果不能妥善校準(zhǔn),則精度非常有限。精心設(shè)計(jì)的lider系統(tǒng)能做到在長(zhǎng)探測(cè)距離下,精準(zhǔn)的測(cè)距,出色的角分辨率,較低的算法處理,所以能夠幫助彌補(bǔ)這些不足。但是,LIDAR系統(tǒng)一般體積大,成本高,這些缺點(diǎn)需要改進(jìn)。
LIDAR系統(tǒng)設(shè)計(jì)要確定系統(tǒng)對(duì)小目標(biāo)的探測(cè)能力,在多少遠(yuǎn)處能探測(cè)到多低反射率的多小尺寸的目標(biāo)。同時(shí)這也就定義了系統(tǒng)需要的角分辨率。由此可以計(jì)算得出可達(dá)到的最小信噪比(SNR),該最小信噪比就決定了系統(tǒng)探測(cè)的檢測(cè)概率與誤檢概率。
了解感知環(huán)境和必要的信息量,作出適當(dāng)?shù)脑O(shè)計(jì)權(quán)衡,從而開(kāi)發(fā)出成本和性能最佳的解決方案。例如,一輛自動(dòng)駕駛汽車(chē)以100 kph (~27 mph)的速度在道路上行駛,而自動(dòng)機(jī)器人則以6 kph的速度在步行區(qū)或倉(cāng)庫(kù)中移動(dòng)。在高速情況下,我們可能不但需要考慮以100 kph的速度行駛的車(chē)輛,還需要考慮以相同速度對(duì)向行駛的另一車(chē)輛。對(duì)于感測(cè)系統(tǒng)來(lái)說(shuō),這相當(dāng)于一個(gè)物體以200 kph的相對(duì)速度接近。對(duì)于LIDAR傳感器來(lái)說(shuō),檢測(cè)對(duì)象之間的最大距離為200 m時(shí),兩車(chē)之間的距離在一秒內(nèi)便會(huì)縮短25%。應(yīng)該注意的是,在進(jìn)行規(guī)避時(shí),汽車(chē)的速度(或與對(duì)象之間的非直線逼近速度)、剎停距離和動(dòng)力學(xué)這些復(fù)雜因素會(huì)因具體情況而異。一般來(lái)說(shuō),高速應(yīng)用需要采用檢測(cè)距離更長(zhǎng)的LIDAR系統(tǒng)。
分辨率是LIDAR系統(tǒng)設(shè)計(jì)中的另一個(gè)重要系統(tǒng)特性。精細(xì)的角度分辨率使LIDAR系統(tǒng)能夠從某一個(gè)被測(cè)目標(biāo)接收到多個(gè)像素的回波信號(hào)。如圖1所示,在200m處,1°角分辨意味著單個(gè)像素寬度為3.5m。這種像素尺寸比許多目標(biāo)的物理尺寸都大,這會(huì)帶來(lái)多重挑戰(zhàn)。首先,我們通常使用空間平均法來(lái)改善SNR和檢測(cè)能力,但是如果目標(biāo)只占據(jù)一個(gè)像素點(diǎn),這種方法并不適用。此外,即使能檢測(cè)到,我們也無(wú)法評(píng)估出目標(biāo)的尺寸。道路上的垃圾碎屑、動(dòng)物、交通標(biāo)志和摩托車(chē),這些物體的尺寸通常都小于3.5米。當(dāng)角分辨率再提升10倍達(dá)到0.1°,對(duì)于200米開(kāi)外的汽車(chē),水平方向就能采集到5個(gè)相鄰的像素點(diǎn)。這意味著在200m開(kāi)外,就能區(qū)分出是汽車(chē)還是摩托車(chē)。(看交通工具的寬度即可,一般情況下交通工具都是寬度大于高度的。且汽車(chē)和摩托車(chē)高度差不多,寬度有明顯區(qū)別)。
為能安全的自動(dòng)行駛,不僅方位角需要高分辨率,有時(shí)候還需要俯仰角高分辨率。想象一下,自動(dòng)化的掃地機(jī)器人盡管移動(dòng)緩慢但是需要檢測(cè)細(xì)高的物體,如桌子腿,以便判斷能否鉆進(jìn)桌下進(jìn)行工作。這個(gè)需求與之前的高速自動(dòng)駕駛需求就不太一樣了。
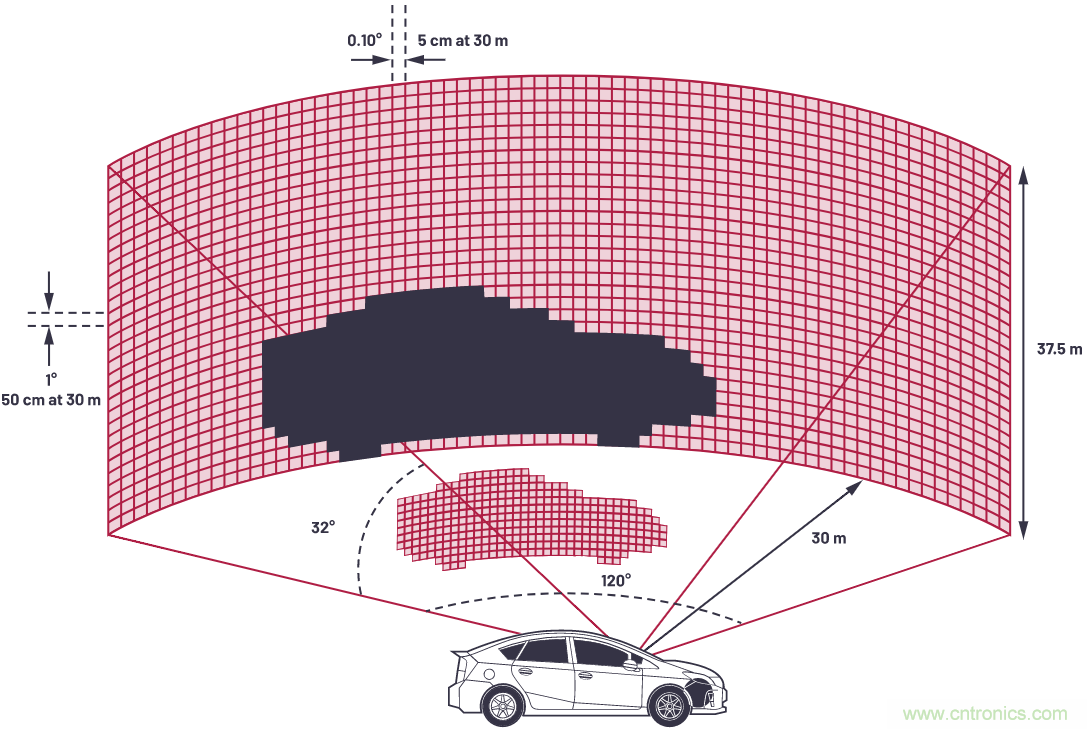
圖1. 1°水平分辨率的32線掃描LIDAR系統(tǒng)
一旦確定下來(lái)自動(dòng)駕駛設(shè)備的速度與行駛場(chǎng)景,需要探測(cè)目標(biāo)的性質(zhì)以及要達(dá)到的性能,就可以構(gòu)建符合其應(yīng)用的LIDAR系統(tǒng)構(gòu)架。您可以做出多種選擇,例如掃描與閃光、直接飛行時(shí)間(ToF)與波形數(shù)字化,但本文暫不討論它們各自的優(yōu)缺點(diǎn)。無(wú)論選擇哪一種架構(gòu),ADI豐富的高性能信號(hào)鏈和電源管理組件產(chǎn)品系列(用藍(lán)色突出顯示,參見(jiàn)圖2)會(huì)提供所需的構(gòu)建塊,幫助設(shè)計(jì)存在不同限制(例如尺寸和成本)的系統(tǒng)。

圖2 使用分立元件的LIDAR系統(tǒng)
AD-FMCLIDAR1-EBZ 是 高性能的LIDAR原型制作平臺(tái),也是905 nm脈沖直接ToF LIDAR開(kāi)發(fā)套件。使用這個(gè)系統(tǒng)可以快速構(gòu)建機(jī)器人、無(wú)人機(jī)、農(nóng)業(yè)和建筑設(shè)備,以及采用1D靜態(tài)閃光配置的ADAS/AV的原型。這個(gè)參考設(shè)計(jì)中選用的組件主要是針對(duì)長(zhǎng)距離脈沖LIDAR應(yīng)用。該系統(tǒng)采用905 nm激光源,由高速、雙通道4 A MOSFET ADP3634驅(qū)動(dòng)。它還包括由可編程電源 LT8331供電(用于生成APD電源電壓)的First Sensor 公司的16通道APD陣列。包括多個(gè)低噪聲、高帶寬的4通道 LTC6561 TIA,一個(gè)AD9094 AD9094 1 GSPS、8位ADC,其在通道上的功耗最低,為每通道435 mW。 我們的設(shè)計(jì)需要繼續(xù)增大帶寬和采樣速率,以幫助提高整個(gè)系統(tǒng)的幀率和范圍精度。與此同時(shí),需要最大限度降低功耗。這是因?yàn)樯釡p少可以簡(jiǎn)化熱/機(jī)械設(shè)計(jì),從而幫助模塊減小外形尺寸。
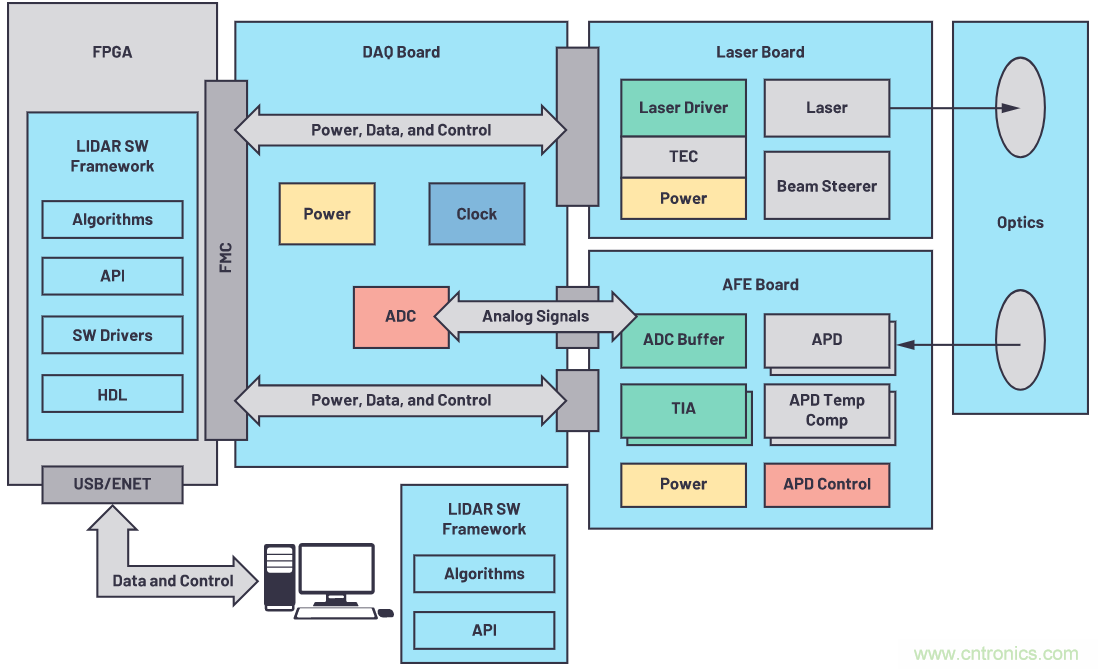
圖3.ADI公司的AD-FMCLIDAR1-EBZ LIDAR開(kāi)發(fā)解決方案系統(tǒng)架構(gòu)。
測(cè)量距離(或深度)、精度都與ADC采樣速率相關(guān)。距離測(cè)量精度使得系統(tǒng)能夠準(zhǔn)確獲知與目標(biāo)之間的距離,對(duì)于需要近距離移動(dòng)的場(chǎng)景(例如停車(chē)或倉(cāng)儲(chǔ)物流),這非常重要。此外,可以根據(jù)多幀之間目標(biāo)距離的變化來(lái)計(jì)算目標(biāo)的速度,這種情況下就要求對(duì)目標(biāo)距離的測(cè)量精度要很高。采用簡(jiǎn)單的閾值算法(例如直接ToF)時(shí),1 ns采樣時(shí)段(也就是,使用1 GSPS ADC)的范圍精度可達(dá)到15 cm。計(jì)算公式為c(dt/2),其中c表示光速,dt表示ADC采樣時(shí)段。鑒于包含ADC,所以,可以采用更復(fù)雜的技術(shù)(例如插值)來(lái)改善范圍測(cè)量精度。據(jù)估計(jì),測(cè)量精度將正比于信噪比的均方根。匹配濾波器是用于處理數(shù)據(jù)的性能最高的算法之一,它可以在插值之后最大化SNR,從而得到最好的距離測(cè)量精度。
EVAL-ADAL6110-16,一款高度可配置的評(píng)估系統(tǒng),可以輔助實(shí)施LIDAR系統(tǒng)設(shè)計(jì)。它為需要實(shí)時(shí)(65 Hz)檢測(cè)/跟蹤對(duì)象的應(yīng)用(例如防撞、高度監(jiān)測(cè)和軟著陸)提供簡(jiǎn)單但可配置的2D閃存LIDAR深度傳感器。
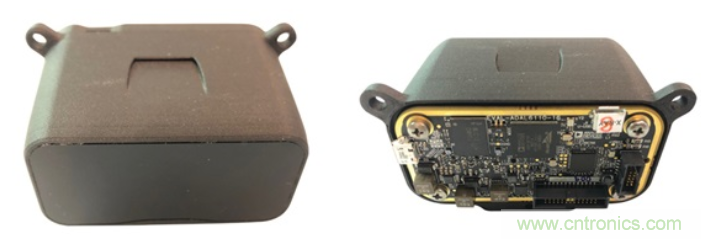
圖4.使用集成式16通道ADAL6110-16的EVAL-ADAL6110-16 LIDAR評(píng)估模塊。
參考設(shè)計(jì)中使用的光學(xué)器件為我們提供了37°(方位角)和5.7°(俯仰角)的視野(FOV)。在方向角的16像素線性矩陣中,20米像素大小相當(dāng)于普通成人的體型,為0.8米(方位角)×2米(俯仰角)。如前所述,不同的應(yīng)用可能需要不同的光學(xué)配置。如果現(xiàn)有的光學(xué)器件不能滿足應(yīng)用需求,可以輕松從殼體上取下印刷電路板,并將其集成到新的光學(xué)配置中。
該評(píng)估系統(tǒng)以ADI的 ADAL6110-16為核心,這是一款低功率、16通道的集成式LIDAR信號(hào)處理器(LSP)。該器件為相關(guān)的照明區(qū)域提供時(shí)序控制和對(duì)接收的波形采樣的時(shí)序,且能對(duì)獲取的波形實(shí)施數(shù)字化。ADAL6110-16集成了高靈敏度的模擬元件,可以幫助降低本底噪聲,使系統(tǒng)能夠捕獲能量很低的回波信號(hào)。相對(duì)于采用類(lèi)似信號(hào)鏈的分立式元件方案,它們的本底噪聲是由rms噪聲決定的,所以其靈敏度不如ADAL6110的方案。此外,使用集成信號(hào)鏈可以減小LIDAR系統(tǒng)設(shè)計(jì)的尺寸大小、重量和功耗。
系統(tǒng)軟件能讓芯片快速測(cè)距以便完成多點(diǎn)測(cè)量。它的通道之間是完全獨(dú)立的,通過(guò)USB提供的單個(gè)5 V電源運(yùn)行,通過(guò)使用該模塊的機(jī)器人OS(ROS)的驅(qū)動(dòng),可以很方便集成進(jìn)現(xiàn)有的自動(dòng)駕駛系統(tǒng)。用戶只需創(chuàng)建一個(gè)連接器,將設(shè)備與機(jī)器人或者車(chē)輛的接口相連,即可通過(guò)以下四種通信協(xié)議進(jìn)行通信:SPI、USB、CAN或RS-232。可以選擇不同的接收器和發(fā)射器技術(shù)對(duì)參考設(shè)計(jì)實(shí)施修改。有關(guān)EVAL-ADAL6110-16和ADAL6110-16 LSP的更多信息,請(qǐng)?jiān)L問(wèn)analog.com/LIDAR.
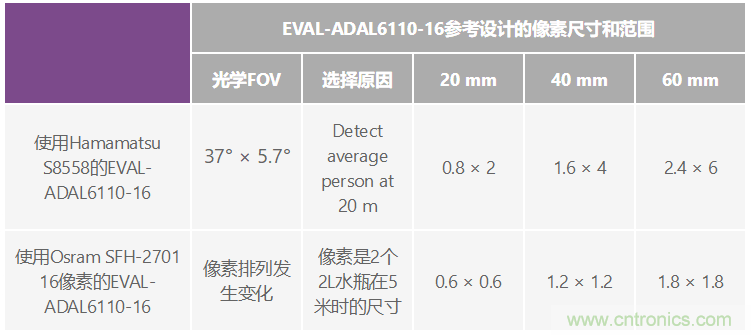
如前所述,可以更改EVAL-ADAL6110-16參考設(shè)計(jì)的接收器技術(shù),以構(gòu)建圖5至圖7所示的不同配置。EVAL-ADAL6110-16采用Hamamatsu S8558 16元件光電二極管矩陣。表1中顯示的不同距離下的像素大小是基于有效像素大小,即0.8 mm×2 mm,以及20 mm的焦距鏡頭。例如,如果使用單個(gè)光電二極管(例如Osram SFH-2701)來(lái)重新設(shè)計(jì)這個(gè)板,且每個(gè)光電二極管的有效面積為0.6 mm × 0.6 mm,那么相同范圍內(nèi)的像素大小會(huì)大為不同,因?yàn)镕OV會(huì)隨像素大小而改變。
表1.EVAL-ADAL6110-16中使用的接收器大小和光學(xué)器件,以及將接收器更換為SFH-2701之后,可能的像素排列
例如,我們來(lái)回顧一下16個(gè)像素配成一行的S8558,各像素尺寸為:2 mm × 0.8 mm。
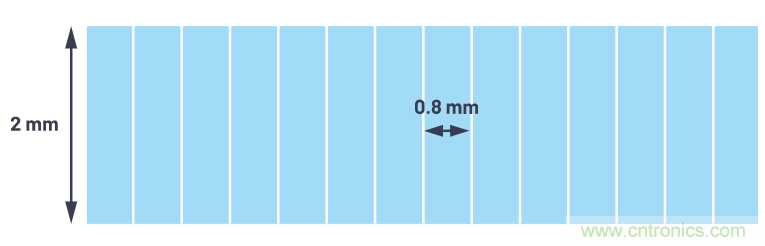
圖5.Hamamatsu S8558 PIN光電二極管陣列的尺寸。
選擇20mm焦距鏡頭后,可以利用基本三角函數(shù)計(jì)算出每個(gè)像素的垂直和水平FOV,如圖6所示。當(dāng)然,選擇鏡頭時(shí)還需要考慮其他更復(fù)雜的因素,比如像差校正和場(chǎng)曲效應(yīng)。但是,對(duì)于這樣的低分辨率系統(tǒng),一般只需要進(jìn)行簡(jiǎn)單的光路計(jì)算。
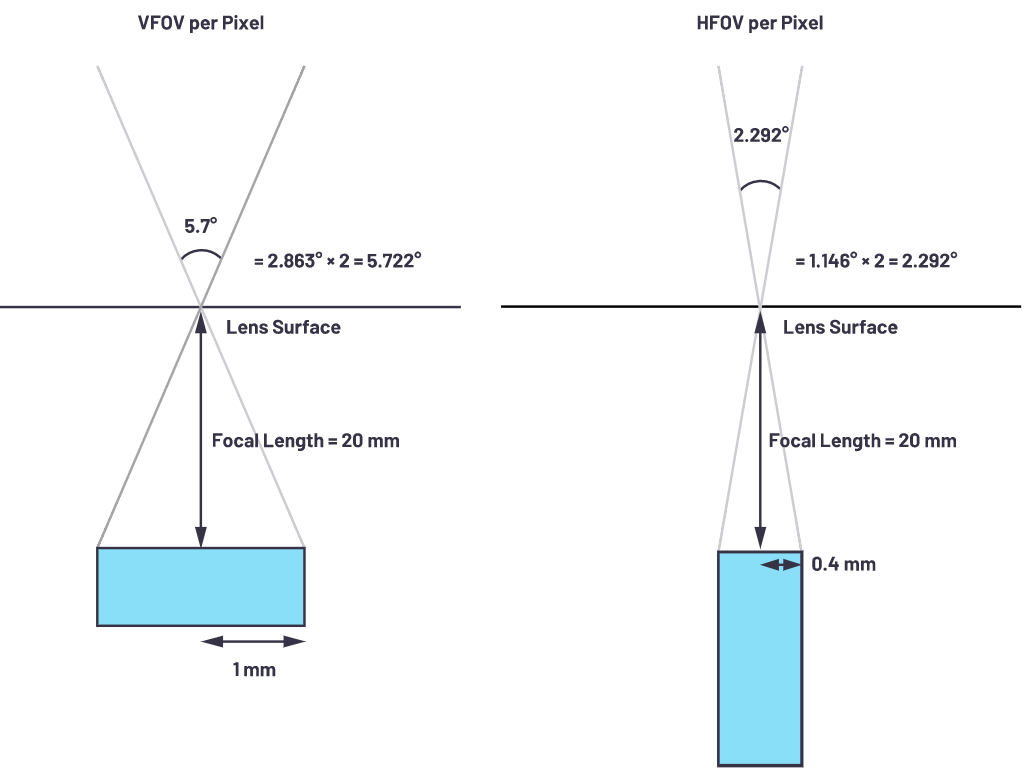

圖6. 簡(jiǎn)單光學(xué)模型的角分辨率基本計(jì)算
所選的1×16像素FOV可用于自動(dòng)駕駛車(chē)輛和自動(dòng)地面車(chē)輛的對(duì)象檢測(cè)和防撞等應(yīng)用中,或者使受限環(huán)境(例如倉(cāng)庫(kù))中的機(jī)器人實(shí)現(xiàn)同步定位與地圖繪制(SLAM)。
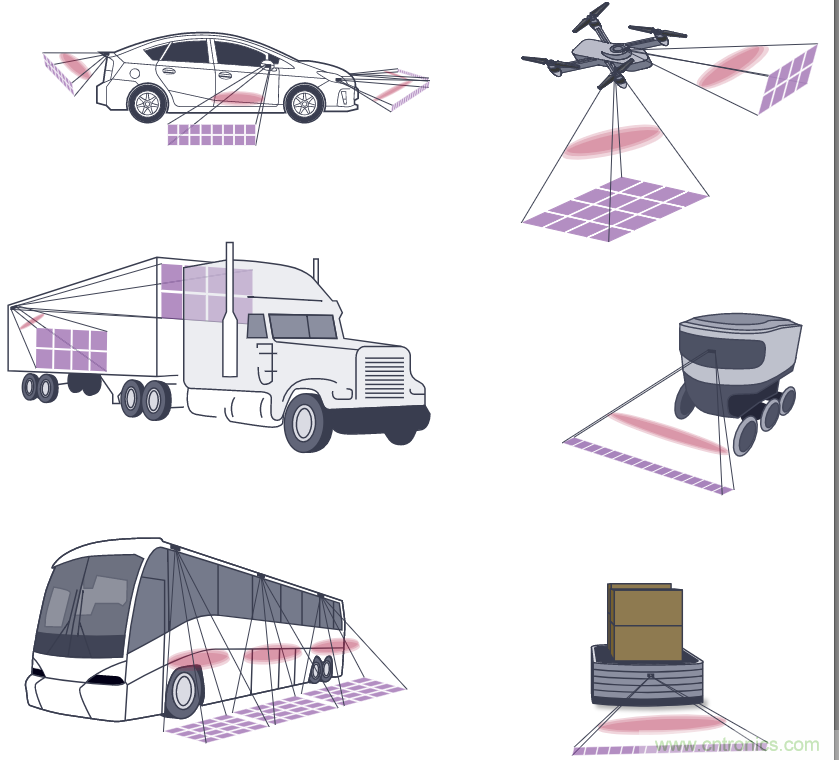
圖7.LIDAR系統(tǒng)的各種光學(xué)配置,可以幫助增強(qiáng)應(yīng)用的安全性。
有一種獨(dú)特應(yīng)用,需要配置4 × 4網(wǎng)格矩陣,以檢測(cè)系統(tǒng)周?chē)奈矬w。這個(gè)正在開(kāi)發(fā)中的應(yīng)用將被安裝在大客車(chē)和RV(休閑車(chē)輛)中,作為車(chē)輛的安全器件,可以在車(chē)輛近旁有行人行走時(shí)向駕駛員發(fā)出警報(bào)。該系統(tǒng)可以檢測(cè)行人行走的方向,提醒駕駛員剎停車(chē)輛或按喇叭提醒行人,以防撞倒行人或自行車(chē)騎行者。
注意,并非每種應(yīng)用都需要0.1°的角分辨率和100米測(cè)量范圍。細(xì)想一下應(yīng)用真正需要采用哪種LIDAR系統(tǒng)設(shè)計(jì),然后明確定義關(guān)鍵標(biāo)準(zhǔn),例如對(duì)象大小、反射率、與對(duì)象的距離,以及自動(dòng)駕駛系統(tǒng)行進(jìn)的速度。
這可以為組件選擇提供依據(jù),使系統(tǒng)設(shè)計(jì)在出色性能、成本和需要的功能之間達(dá)成平衡,以便大幅提高首次設(shè)計(jì)成功的可能性。
推薦閱讀:




